
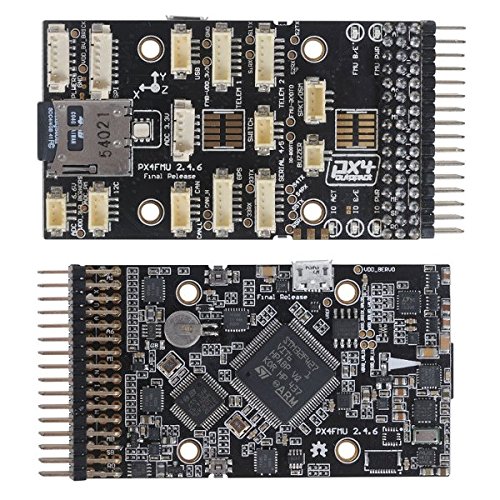



PX4 Pixhawk V2.4.6 32Bits Open Source Flight Controller with Switch Buzzer External LED Notice: It can't be upgraded. Notice: It can't be upgraded. Description: Improvements on V2.4.3 V2.4.6 PCB board Redeveloped and optimized circuit without changing components Could use Official MissionPlanner, ECLIPSE firmware upgrade Processor: 32bit STM32F427 Cortex M4 core with FPU 168 MHz 256 KB RAM 2 MB Flash 32 bit STM32F103 failsafe co-processor Sensors: ST Micro L3GD20H 16 bit gyroscope ST Micro LSM303D 14 bit accelerometer / magnetometer MEAS MS5611 barometer Interfaces 5x UART (serial ports), one high-power capable, 2x with HW flow control 2x CAN (one with internal 3.3V transceiver, one on expansion connector) Spektrum DSM / DSM2 / DSM-X® Satellite compatible input Futaba S.BUS® compatible input and output PPM sum signal input RSSI (PWM or voltage) input I2C SPI 3.3 and 6.6V ADC inputs Internal microUSB port and external microUSB port extension Power System and Protection Ideal diode controller with automatic failover Servo rail high-power (max. 10V) and high-current (10A+) ready All peripheral outputs over-current protected, all inputs ESD protected Features: 168 MHz / 252 MIPS Cortex-M4F 14 PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible) Abundant connectivity options for additional peripherals (UART, I2C, CAN) Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use) Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed wing use)
Trustpilot
1 week ago
1 month ago
